

合作机构:阿里云 / 腾讯云 / 亚马逊云 / DreamHost / NameSilo / INWX / GODADDY / 百度统计
资讯热度排行榜
- 92631大模型×文本水印:清华、港
- 91542一文读懂如何基于 GenA
- 911632024 年,3 项技术将
- 90864AI在工业物联网(IIoT
- 90825利用人工智能增强网络安全防
- 90796GPT-4准确率最高飙升6
- 90797人工智能和机器学习在物联网
- 90568一句话让小姐姐为我换了N套
- 90549AI时代来了,专业摄影师会
- 9049102024年人工智能与数字孪
推荐阅读
- 01-241技术趋势:2024年的热点是什么
- 01-252网络安全在自动驾驶汽车中的作用
- 01-253OpenAI创始人想打造全球芯片
- 01-264强化学习和世界模型中的因果推断
- 01-265Mamba论文为什么没被ICLR
- 01-296让知识图谱成为大模型的伴侣
- 01-297从20亿数据中学习物理世界,基于
- 01-298谷歌云与Hugging Face
- 01-299人工智能和机器学习在物联网中的作
- 01-2910无需人工标注!LLM加持文本嵌入
扫地机器人多种传感器的实际体验:家居环境下来去自如
我们近期接触了不少具备扫拖一体功能的扫地机器人新品,也对于2021年以来旗舰产品在感知硬件与智能功能方面的进化有了充分体验。在之前的一篇文章中我们提到过,即使有着强大的扫描硬件和识别算法的支持,我们在市面上也很难见到纯粹的激光雷达方案,纯视觉方案则比比皆是,这个现象无论是在智能汽车还是家庭服务机器人领域都值得注意,成熟的产品往往会将激光雷达搭配3D结构光、毫米波雷达、视觉识别等技术组合使用。

建图导航与避障识别的能力是扫地机器人实现高效工作的重要基础,而支持这类功能需要扫地机器人拥有激光雷达、dToF、视觉摄像头等外部硬件,也不能忽视内置的高性能处理器以及运行于其上的软件算法等内在配置。
激光雷达等dToF(直接测量飞行时间)原理的技术在各类家用服务机器人产品中的应用已趋成熟,决定工作效率的更关键因素往往出现在软件层面。在激光雷达的眼中,周边环境的构造以点云的形态存在,而SLAM算法的出现使扫地机器人、无人机等产品能够利用实时更新的点云数据进行地图构建与自身定位,在初次接触的环境中实现快速建图与定位导航,配合内置SoC则能够实现地图的存储与重复调用。
而在避障功能方面,扫地机器人有着三条技术路径:一是从早期阶段一脉相承的碰撞算法,只要压力传感器感知到碰撞,扫地机器人就会停下,并且向着另一个方向前进。二是固定式的dToF,这类硬件一般配置在扫地机器人前进方向的周边,使用各种波长的调制波来达到不同的探测效果,但能够获得的最直观数据依然是距离。三是视觉方案,可能有许多人听说过埃隆马斯克的观点:汽车应该像人类一样用眼睛(视觉信息)实现自动驾驶,在扫地机器人尤其是高端定位产品中也有着这一思路的具体应用。它们通过搭载高清晰度、高感光度摄像头,搭配运用了AI技术的识别算法来感知家庭环境中的布局和各种障碍物,乃至实时感知人类活动,作出避让等反应。

这三条技术路径许多时候以组合形式存在于扫地机器人产品中,带来了真正实用化的避障能力,它们能够穿行于各种限高、限宽的狭小区域间,同时准确环绕障碍物周边死角进行清洁,拥有很强的环境适应性。
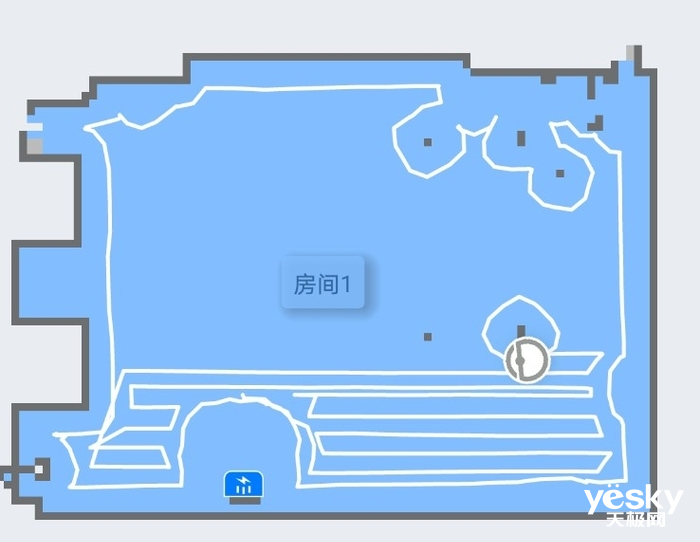
而对于相对开阔的区域,扫地机器人则能够规划好最佳路线以较高的覆盖率、较低的重复率进行地面清洁。我们在使用中可以从APP界面看到它们的清洁轨迹,在划定好清洁区域的便捷轮廓后,扫地机器人通常会以相对规整的“弓形路线”对开阔区域进行覆盖,提升覆盖率的同时尽可能以直线行进提升清洁的效率。

可以说在近几年来,技术的发展为扫地机器人带来的功能提升是巨大的,同时这类产品的属性也正发生着潜移默化的变迁,区别于名义上的“机器人”,真正的“机器人化”趋势正在近一年诞生的尖端新品中传播。在当下它们还普遍存在着不小的上升空间,而在不远的未来,“机器人化”的趋势将可能彻底改变我们的生活形态。
关键字:
声明:我公司网站部分信息和资讯来自于网络,若涉及版权相关问题请致电(63937922)或在线提交留言告知,我们会第一时间屏蔽删除。
有价值
0% (0)
无价值
0% (10)
发表评论请先登录后发表评论。愿您的每句评论,都能给大家的生活添色彩,带来共鸣,带来思索,带来快乐。
-
TOP