

合作机构:阿里云 / 腾讯云 / 亚马逊云 / DreamHost / NameSilo / INWX / GODADDY / 百度统计
资讯热度排行榜
- 92631大模型×文本水印:清华、港
- 91542一文读懂如何基于 GenA
- 911632024 年,3 项技术将
- 90864AI在工业物联网(IIoT
- 90825利用人工智能增强网络安全防
- 90796GPT-4准确率最高飙升6
- 90797人工智能和机器学习在物联网
- 90568一句话让小姐姐为我换了N套
- 90549AI时代来了,专业摄影师会
- 9049102024年人工智能与数字孪
推荐阅读
- 01-241技术趋势:2024年的热点是什么
- 01-252网络安全在自动驾驶汽车中的作用
- 01-253OpenAI创始人想打造全球芯片
- 01-264强化学习和世界模型中的因果推断
- 01-265Mamba论文为什么没被ICLR
- 01-296让知识图谱成为大模型的伴侣
- 01-297从20亿数据中学习物理世界,基于
- 01-298谷歌云与Hugging Face
- 01-299人工智能和机器学习在物联网中的作
- 01-2910无需人工标注!LLM加持文本嵌入
家电数码设备的“眼睛” 多种3D探测技术如何为家居生活服务
伴随着小到手机数码、家电设备,大到汽车等交通工具的智能化进程,传感器种类的丰富与性能的提升越来越成为支撑智能功能落地实用的重要基础。其中通过激光雷达、视觉算法、光脉冲、3D结构光等手段实现的3D探测功能正是时下应用的热点。
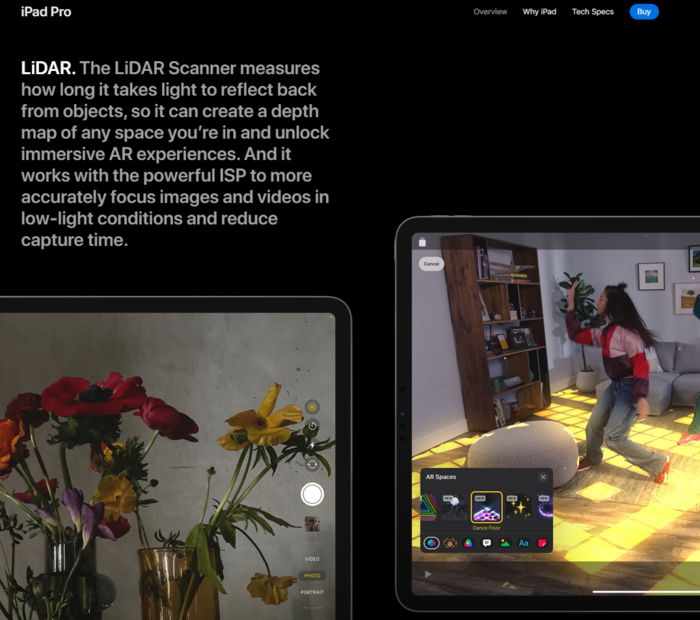
在手机的领域,有许多厂商都推出了运用3D结构光实现面容识别解锁的前置摄像模组,实现抬起解锁功能。苹果还在iPhone与iPad Pro的后置摄像模组中运用了dToF,实现暗场辅助对焦、AR增强与拍照测距等功能;汽车领域综合运用了激光雷达、视觉算法等多种手段实现对道路标线与路况的实时监测,为各类自动辅助驾驶功能提供所需的数据;而在家电领域,3D探测功能则随着家电品类的不同有着更加多样的应用,例如智能投影与激光电视通常采用dToF技术实现快速对焦与画面矫正,即使相对投影屏的距离与角度改变了,也可自动进行相应调整,为用户提供稳定的观看体验。
目前的家电设备中,对于此类3D探测功能需求最大且应用最为复杂深入的品类应该是扫地机器人,其测绘、规划、导航、避障等功能往往也需要综合运用包括dToF、激光雷达、3D结构光、视觉算法等在内的技术,可以说与自动驾驶汽车有着多种相似之处。但我们能够看到以科沃斯为例,许多扫地机器人厂商都选择以dToF逐步代替激光雷达等技术作为导航信息的测绘技术,它们之间各有什么优劣呢?

dToF全称为直接测量飞行时间,是一种通过发射光信号(包括红外光、激光等)与探测反射信号进行测距的技术,通过这一技术能够实现低功耗、抗干扰、高精度、响应连续且快速的距离测量,不过缺点在于分辨率较低,无法探知更多目标表面细节,所以用途以测距为主。用于扫地机器人时,可以通过高频率测距快速绘制出家庭环境内的大致可清扫区域范围,同时受环境光等干扰的影响较小。
激光雷达从原理而言就是一种特定的dToF技术,同样通过反射+三角定位的方式进行环境测绘,由于激光的集束特性能够绘制出密度更高的点图,相对红外等dToF而言有更高的探测分辨率,但其硬件成本较高,探测面较小,需要在机身高位配备旋转装置以进行不间断的覆盖扫描,增加一部分活动部件降低了可靠性。
与其他类型dToF相比,激光雷达增加了探测分辨率,使其能够兼顾一定的避障、防撞能力,但我们需要知道的是扫地机器人作为多个系统的集合,通过配备其他特性的3D探测技术可以实现更加专业的避障能力,同时能够在保证效能的前提下降低一定成本。

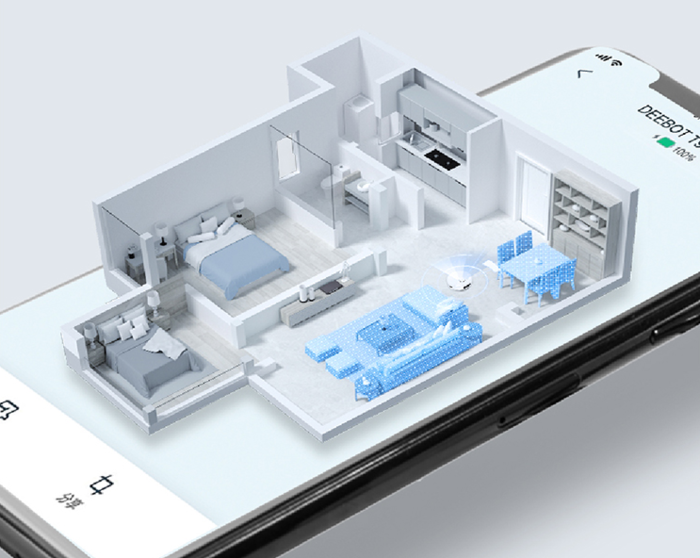
3D结构光、AI视觉算法等技术正是为此准备的,相应模块被配备于扫地机器人前进方向的一侧,负责在移动中对体积更小或是位于dToF探测死角的障碍物进行感知,针对临时出现的人或家庭宠物活动也能及时感知并进行处理。同时在光线良好的环境下,这两项以视觉信息为主的探测技术也能够辅助dToF等导航测绘技术生成可视化的立体户型图,便于用户在手机等终端上进行查看与操作。
如今我们提到家居、家电总是离不开“智能”二字。常规的固定式家电产品在智能化与万物互联的加持下能够提供多样化功能与更好的使用体验,同时以“机器人”为核心概念,以自律移动为功能实现手段的扫地机器人等新式家电,也正以更大的覆盖面解放我们的双手。对美好生活的渴望总是成为家电智能化前进的动力,我们期待各类3D探测技术的进步和深度应用,能够带来更好的出行与家居生活体验。
关键字:
声明:我公司网站部分信息和资讯来自于网络,若涉及版权相关问题请致电(63937922)或在线提交留言告知,我们会第一时间屏蔽删除。
有价值
0% (0)
无价值
0% (10)
发表评论请先登录后发表评论。愿您的每句评论,都能给大家的生活添色彩,带来共鸣,带来思索,带来快乐。
-
TOP